Transformations in Math — Translation, Reflection, Rotation, Dilation
Transformations
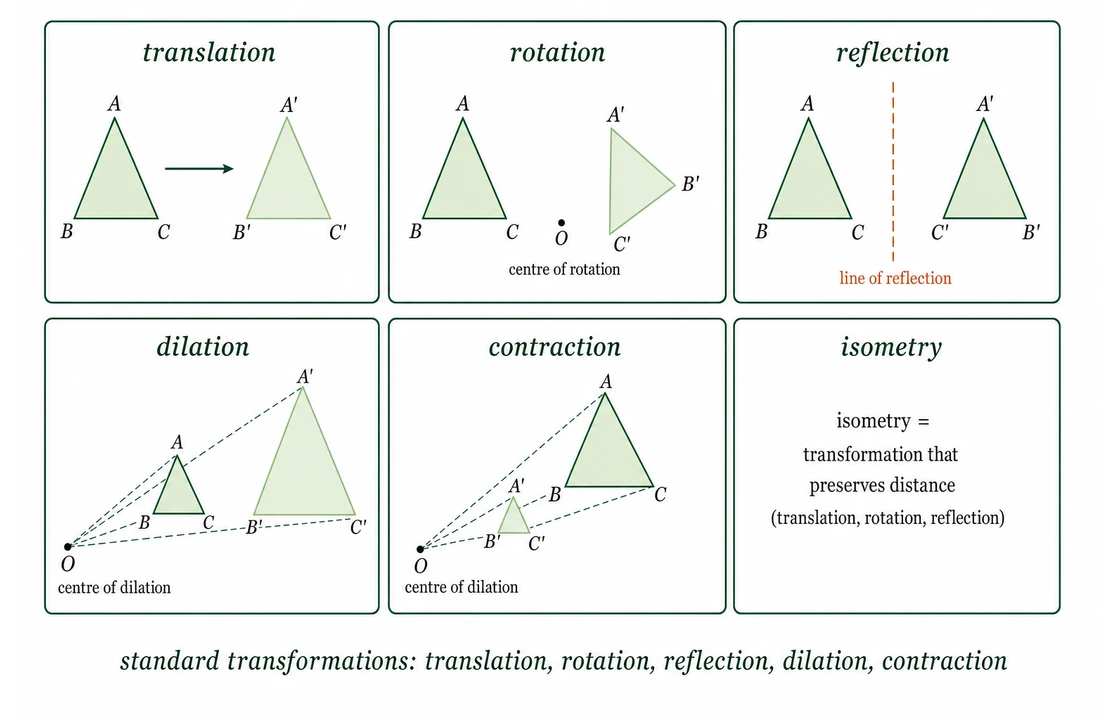
Operations that alter the form of a figure. The standard transformations are translations, reflections, dilations (stretches), compressions (contractions or shrinks), and rotations.
Key Formula
Translation: (x,y)→(x+a,y+b)Reflection over x-axis: (x,y)→(x,−y)Reflection over y-axis: (x,y)→(−x,y)Rotation 90∘ CCW about origin: (x,y)→(−y,x)Dilation centered at origin: (x,y)→(kx,ky)
Where:
- a = Horizontal shift (positive = right, negative = left)
- b = Vertical shift (positive = up, negative = down)
- k = Scale factor for dilation (k > 1 enlarges, 0 < k < 1 shrinks)
- (x,y) = Coordinates of a point on the original figure (pre-image)
Worked Example
Problem: Triangle ABC has vertices A(1, 2), B(4, 2), and B(4, 6). Translate the triangle 3 units left and 5 units up. Find the coordinates of the image.
Step 1: Identify the translation rule. Moving 3 units left means a = −3, and 5 units up means b = 5.
(x,y)→(x−3,y+5)
Step 2: Apply the rule to vertex A(1, 2).
A′=(1−3,2+5)=(−2,7)
Step 3: Apply the rule to vertex B(4, 2).
B′=(4−3,2+5)=(1,7)
Step 4: Apply the rule to vertex C(4, 6).
C′=(4−3,6+5)=(1,11)
Step 5: The translated triangle A'B'C' has the same shape and size as triangle ABC — translation is a rigid motion (isometry).
Answer: The image vertices are A'(−2, 7), B'(1, 7), and C'(1, 11).
Another Example
This example demonstrates a composition of two different types of transformations — a rigid motion (reflection) followed by a non-rigid motion (dilation) — showing how transformations can be combined in sequence.
Problem: Point P(3, −4) undergoes two transformations in sequence: first a reflection over the x-axis, then a dilation centered at the origin with scale factor 2. Find the final image P''.
Step 1: Apply the reflection over the x-axis. This rule negates the y-coordinate.
P(3,−4)→P′(3,−(−4))=P′(3,4)
Step 2: Apply the dilation with k = 2 to the reflected point P'(3, 4).
P′(3,4)→P′′(2⋅3,2⋅4)=P′′(6,8)
Step 3: Note that the reflection preserved distance (isometry), but the dilation changed the figure's size. The composition of these two transformations is not an isometry.
Answer: The final image is P''(6, 8).
Frequently Asked Questions
What is the difference between rigid and non-rigid transformations?
Rigid transformations (also called isometries) preserve the size and shape of a figure. Translations, reflections, and rotations are all rigid. Non-rigid transformations change the size of a figure; dilations and compressions are non-rigid. After a rigid transformation, the image is congruent to the pre-image, while after a non-rigid transformation it is only similar.
What is the difference between a pre-image and an image in transformations?
The pre-image is the original figure before the transformation is applied. The image is the resulting figure after the transformation. By convention, if the pre-image vertices are labeled A, B, C, the image vertices are labeled A', B', C' (read "A prime, B prime, C prime").
Does the order of transformations matter?
Yes, the order usually matters. For example, reflecting a point and then translating it typically gives a different result than translating first and then reflecting. This is because composition of transformations is generally not commutative. Always apply transformations in the order specified.
Rigid Transformations (Isometries) vs. Non-Rigid Transformations
| Rigid Transformations (Isometries) | Non-Rigid Transformations | |
|---|---|---|
| Definition | Preserve distances and angles between all points | Change distances between points (alter size) |
| Types | Translation, reflection, rotation | Dilation, compression |
| Image vs. Pre-image | Image is congruent to pre-image | Image is similar (but not congruent) to pre-image |
| Scale factor | Always k = 1 (no size change) | k ≠ 1 (k > 1 enlarges, 0 < k < 1 shrinks) |
| Example | Sliding a shape 5 units right | Doubling every side length of a shape |
Why It Matters
Transformations are central to geometry courses and standardized tests, where you must identify, describe, and perform them on coordinate planes. They provide the foundation for understanding congruence (through rigid motions) and similarity (through dilations). Beyond the classroom, transformations are essential in computer graphics, animation, engineering design, and physics, where objects are constantly moved, scaled, and rotated.
Common Mistakes
Mistake: Mixing up the coordinate rules for reflections — for example, negating the x-coordinate when reflecting over the x-axis.
Correction: Reflecting over the x-axis negates the y-coordinate: (x, y) → (x, −y). Reflecting over the y-axis negates the x-coordinate: (x, y) → (−x, y). A helpful way to remember: the coordinate that matches the axis name stays the same.
Mistake: Applying transformations in the wrong order when performing a composition.
Correction: Always apply transformations in the sequence given. If a problem says "reflect then translate," perform the reflection first and use the resulting coordinates as the input for the translation. Reversing the order will usually produce a different, incorrect answer.
Related Terms
- Shift — Another name for a translation transformation
- Reflection — Rigid transformation that flips over a line
- Rotation — Rigid transformation that turns about a point
- Dilation — Non-rigid transformation that enlarges or reduces
- Compression — Non-rigid transformation that shrinks a figure
- Isometry — Any transformation that preserves distances
- Pre-Image of a Transformation — The original figure before transformation
- Image of a Transformation — The resulting figure after transformation